Dynamic Adaptation of TUFs
One of the most effective aspects of a TUF’s expressiveness is that the function can be adapted to dynamic changes.
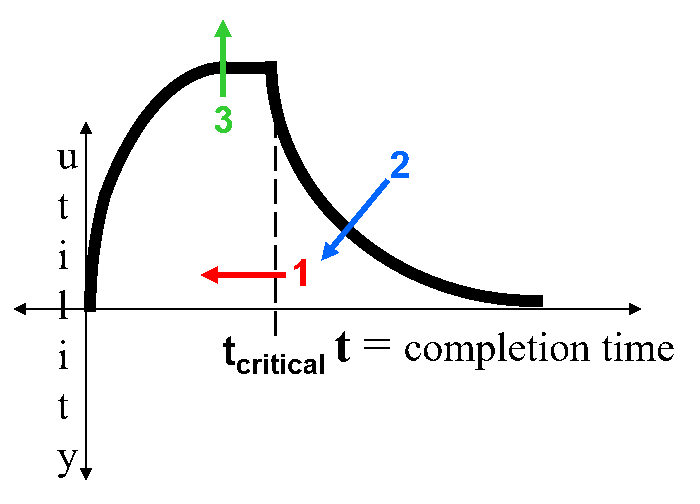
For example, the TUF below can be dynamically changed in three directions:
- its critical time, defined as the time after which the function’s value (utility) will always be less;
- its hardness;
- its maximum utility value.
These three dynamic adaptations can be illustrated with a fragment from a notional missile defense scenario (simplified from an actual use case). In this fragment, the timeliness requirements for sending guidance updates to an interceptor missile change during the interception engagement.
After interceptor launch, the guidance control actions must issue timely repetitive course updates to ensure a successful intercept. The required timeliness of these updates, and the importance of completing the course corrections at the desired time, change as the distance decreases between the interceptor and the enemy missile, and between the enemy missile and its expected target, as depicted in the three engagement snapshots below.
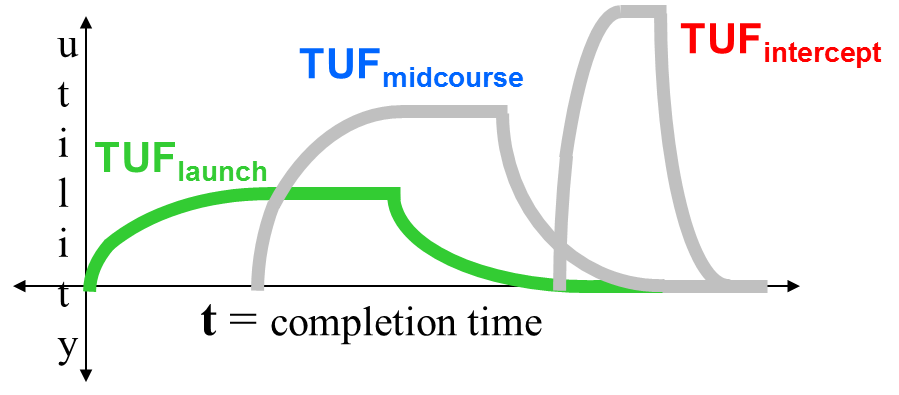
Interceptor guidance update action TUF at target launch time
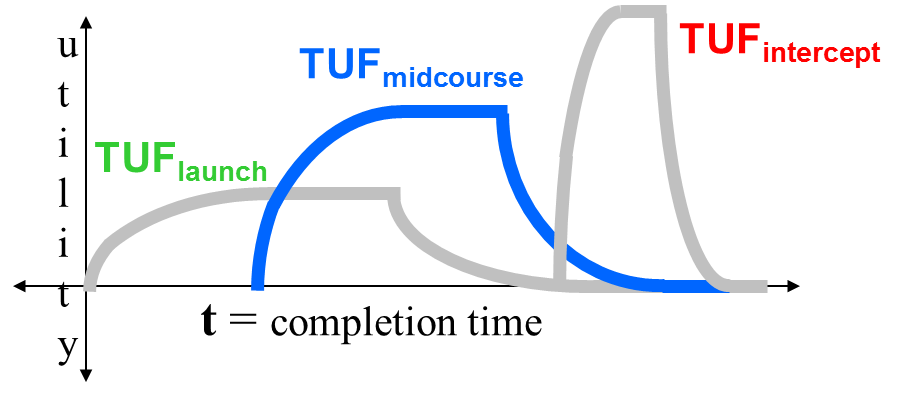
Interceptor guidance update action TUF at target midcourse time
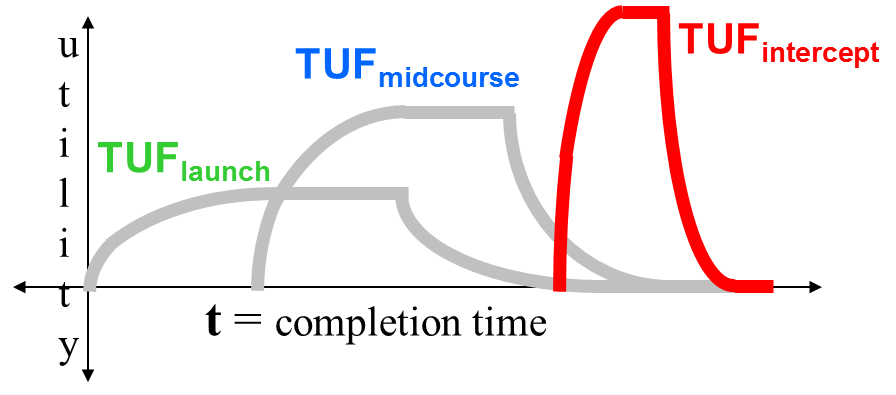
Interceptor guidance update action TUF at target intercept time
Experience validated the intuitive expectation that it is very difficult to approximate the equivalent of such extremely expressive adaptive dynamic time constraints using conventional real-time computing techniques such as deadlines and priorities.
Unsurprisingly, implementing dynamically adaptive action TUFs can also be difficult, requiring application-specific clever engineering for the cost to be worth the mission operational effectiveness. Fortunately, the applications to which dynamically adaptive TUFs have been successfully applied are well represented by this notional interceptor guidance example—operational effectiveness is literally a matter of life and death, and the typical mission time frames on the order of 10-1 to 102 seconds allow for sophisticated resource management algorithms.